Buffer Organizer
The Buffer Organizer is the "corrector" half of our predictor/corrector model. It attempts to correct sub-optimal DPE placements by moving data among buffers.
Objectives
- Management of hierarchical buffering space
- Data flushing
- Read acceleration
- Manage data life cycle, or journey
- When is the blob in equilibrium?
- How do we eliminate unnecessary data movement?
Blob Scoring
We attempt to meet the above objectives via a Blob scoring system. Each Blob has two different scores associated with it: the importance score and the access score.
Importance Score
The importance score is a real number in the range [0, 1] where 0 represents a Blob that is not important to the user (i.e., it will not be accessed) and 1 represents a Blob that will be accessed either very frequently, very soon, or both.
Variables that might contribute to the importance score
- Blob Size
- Blob Name
- Recency of Blob access
- Frequency of Blob access
- User-supplied priority (this is only a hint, not a guarantee).
Access Score
This is a real number in the range [0, 1] where 0 represents a Blob with the slowest access time (i.e., all its Buffers are in the slowest tier) and 1 represents a Blob with the quickest access time (all the Buffers are in the fastest tier).
Variables that contribute to the access score
- Bandwidth of the tiers that contain the
Blob'sBuffers. - The
Blobdistribution (i.e., is all the data in a singleBuffer, or is it spread out among multipleBuffers on multiple nodes?).
How the scores are used
The goal of the BufferOrganizer is to ensure that each Blob's access score is closely aligned to its importance score.
Ideas
- If a
Blob'sBuckethas a reference count of 0 (i.e., no process has an open handle to theBucket) then the importance score should be 0. The score is only calculated once at least one process opens theBucket.
Operations
All BufferOrganizer operations are implemented in terms of 3 simple
operators
- MOVE(BufferID, TargetID)
- COPY(BufferID, TargetID)
- DELETE(BufferID)
With these operators, we can build more complex tasks:
Transfer
Move a BufferID from one set of Targets to another.
Who can initiate Transfer tasks?
- The System (load balancing)
- The User (producer/consumer)
Evict(size_t bytes, Targets[])
Move a set of BufferIds from one set of Targets to an unspecified
location (could even be swap space).
Who can initiate Eviction tasks?
- Put (DPE)
- Get (Prefetcher)
- Thread that updates the
SystemViewState(enforces a minimum capacity threshold passed in through the config).
Who translates an Eviction into a series of Transfers?
- DPE?
- BO?
Single shared file pros
- Could theoretically reap performance benefits of collective IO operations, although I don't think we'll ever be able to capitalize on this because each rank must act independently and can't synchronize with the other ranks.
- Less stress on the PFS metadata server.
File per rank pros
- Don't have to worry about reserving size for each rank.
- Don't have to worry about locking.
File per node
- We'll go with this for the initial implementation.
- Don't have to worry about locking or reserving size with respect to
the buffer organizer. However, since multiple ranks could
potentially write to the same swap file, we need to either
- Filter all swap traffic through the buffer organizer
- Synchronize all access to the file
- Won't overload the metadata servers as bad as file per rank.
Triggers
The Buffer Organizer can be triggered in 3 ways:
Periodic
The period can be controlled by a configuration variable.
Client-triggered
- If, for any reason, a client DPE places data to the swap target, it will also trigger the buffer organizer by adding an event to the buffer organizer's queue.
- We store the blob name, the offset into the swap target (for file-based targets), and the blob size.
- When the buffer organizer processes an event, it
- Reads the blob from the swap target into memory.
- Calls
Putto place the blob into the hierarchy. If thePutfails, it tries again, up tonum_buffer_organizer_retries(configurable) times.
System-triggered
- Nothing is implemented yet.
- Should the BO constantly monitor the buffering hierarchy and attempt to maintain a set of rules (remaining capacity percentage, thresholds, etc.)?
- Should the BO simply carry out "orders" and not attempt to make its own decisions? If so, who gives the orders?
- Should the BO be available for other asynchronous tasks?
Requirements for Queue implementation
- (At least) 2 different priority lanes
- Node local and remote queues (but only for neighborhoods, not global queues).
- Need ability to restrict queue length
Design Details
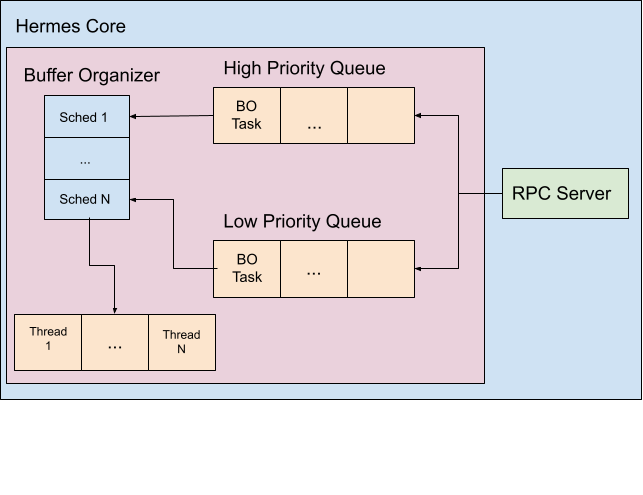
BO RPC Server
- RPC is used to route
BoTasks to the appropriate Hermes core.
- The
BORPC server only has one function:bool EnqueueBoTask(BoTask task, Priority priority);
[[../images/bo_rpc.png]]
Buffer Organizer
Work Queues
- Argobots pools
- High and low priorities
- Basic FIFO queue by default
- Completely customizable (e.g., could be a priority queue, min-heap, etc.)
Schedulers
- Argobots schedulers
- Takes tasks from the queues and runs them on OS threads as user level threads (basically coroutines).
- Completely customizable.
- By default, one scheduler is associated with a single execution stream (OS thread).
- Only take tasks from low priority queue if high priority queue is empty?
Threads
- Argobots execution streams
- Bound to a processing element (CPU core or hyperthread), and shouldn't be oversubscribed.
Example Flows
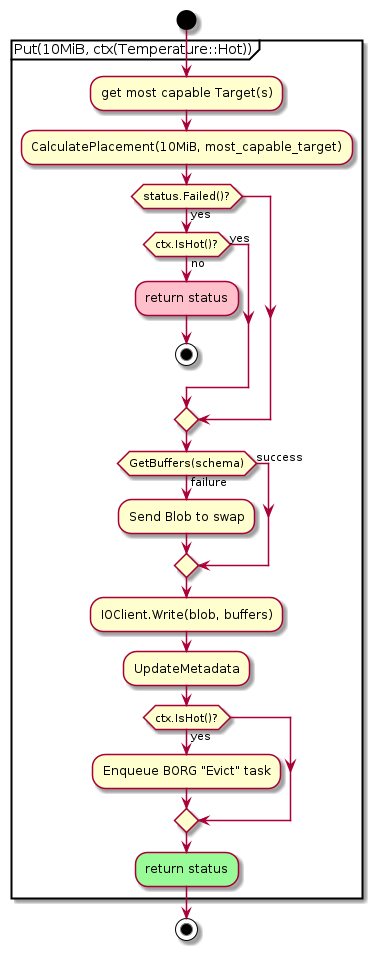
Hot Put
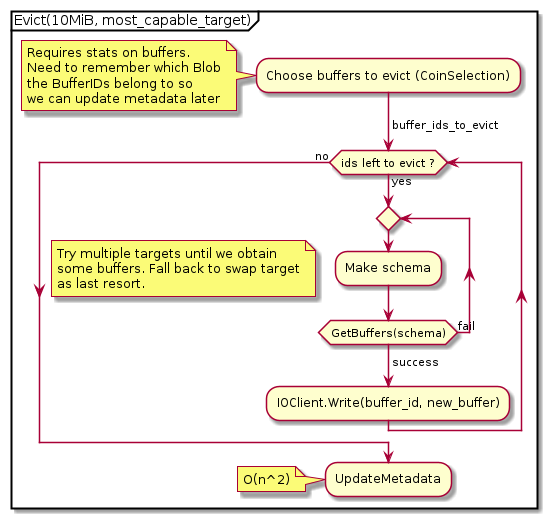
BO Eviction Flow
Ideas
- An importance score of 0 could be the signal to flush a
Blobto the PFS. StageInandStageOutAPIs- Reverse "gravity" for read heavy workloads.
Blobstrickle up to higher tiers. - Explicitly maintain Target capacity thresholds.
- Introduce horizontal movement if Topology threshold is exceeded.
Experiments
- Test the difference between flushing tier by tier vs skipping tiers. For example, a
Blobmoving from RAM to burst buffer could go through NVMe as an intermediate tier, or skip it altogether.